
Tærskelprocedure
De tærskelværdien metoder er en gruppe af algoritmer til at segmentere digitale billeder . Segmentering generelt kan være et vigtigt skridt i billedanalyse, for eksempel for at identificere objekter i billedet. Ved hjælp af tærskelværdimetoder er det muligt at beslutte i enkle situationer, hvilke pixels der repræsenterer søgte objekter, og hvilke der hører til deres omgivelser. Tærskelmetoder fører til binære billeder .
introduktion
Motivationen for at bruge binære billeder er normalt tilgængeligheden af hurtige binære billedealgoritmer, for eksempel til blob-analyse ; besparelsen af lagerplads spiller en mindre rolle i billedbehandlingsapplikationer i dag.
Som med alle segmenteringsmetoder tildeles billedpunkter - de såkaldte pixels - med tærskelværdimetoden til forskellige grupper - de såkaldte segmenter . Billedet, der skal segmenteres, har form af numeriske værdier (en eller flere farveværdier pr. Pixel). Tilknytningen af en pixel til et segment bestemmes ved at sammenligne gråværdien eller en anden endimensionel funktion med en tærskelværdi . Den grå værdi af en pixel er dens rene lysstyrkeværdi; yderligere farveoplysninger tages ikke i betragtning. Da denne operation for det meste anvendes uafhængigt af hver pixel, er tærskelværdimetoden en såkaldt pixelorienteret segmenteringsmetode.
Tærskelværdimetoder er blandt de ældste metoder inden for digital billedbehandling . Den velkendte Otsu-proces, der er beskrevet i afsnittet med samme navn, blev offentliggjort i 1979 af Nobuyuki Otsu . Der er dog ældre publikationer om dette emne. Tærskelværdimetoder kan implementeres hurtigt på grund af deres enkelhed, og segmenteringsresultater kan beregnes med lille indsats. Imidlertid er kvaliteten af segmenteringen generelt dårligere end med mere komplekse metoder.
klassifikation
Billedsegmentering er normalt det første trin i billedanalyse i maskinvisionsprocessen og finder sted efter billedforbehandling. Den typiske sekvens i et billedbehandlingssystem er som følger:
Scene → billedoptagelse → billedforbehandling → segmentering (f.eks. Tærskelværdimetode ) → træk af funktion → klassificering → udsagn
Scenen repræsenterer et eller flere virkelige, observerede objekter Med passende sensorer genereres et billede af scenen, normalt et fotografi eller en videooptagelse . I princippet kan enhver billedbehandlingsmetode imidlertid fungere som billedkilde, således at f.eks. Radarscanninger eller røntgenbilleder også kan bruges . Hvis billedet ikke er tilgængeligt i digital form, skal det først digitaliseres ved scanning, for eksempel for at kunne behandle det yderligere i computeren.
Billedforbehandling forbedrer billedet, så følgende trin kan udføres mere effektivt. Dette kan f.eks. Betyde en lysstyrkekorrektion, kontrasten kan forbedres eller kanterne skærpes. Hvilke forbehandlingsoperationer, der er gunstige, afhænger af de specifikke procedurer i de følgende trin. Tærskelværdimetoder er generelt modtagelige for ændringer i lysstyrke i billedet, så lysstyrkekompensation kan være fordelagtig.
I segmenteringstrinnet er billedets pixels opdelt i segmenter, for hvilke der f.eks. Anvendes en tærskelværdimetode. I den efterfølgende funktionsekstraktion bestemmes bestemte egenskaber - de såkaldte funktioner - for hvert segment . Hvilke egenskaber disse er, afhænger meget af det enkelte tilfælde. Eksempler inkluderer området, formens excentricitet eller den gennemsnitlige farveværdi.
Ved hjælp af egenskaberne og et tidligere bestemt regelsæt eller en tidligere uddannet klassificering kan hvert segment nu klassificeres i en af flere klasser. Ved at fortolke dette resultat kan en endelig erklæring fremsættes, for eksempel i tekstgenkendelsen "Objektet afbildet er bogstavet 'f' og intet andet".
egenskaber
Normalt binærgør tærskelværdiprocessen et indledende billede, dvs. der dannes nøjagtigt to segmenter - i hvad der sandsynligvis er den mest almindelige anvendelse til denne proces, ideelt set baggrunden og de objekter, der søges. Tildelingen til de to segmenter (0 og 1) finder sted på basis af en sammenligning af den grå værdi g af den observerede pixel med den tidligere definerede tærskelværdi t ( engelsk tærskel betyder "tærskelværdi"). Det resulterende billede kan derfor beregnes med meget lille beregningsindsats , da der kun skal udføres en enkel sammenligningsoperation pr. Pixel. Den tilsvarende beregningsregel i figuren er:


Tærskelværdimetoderne er såkaldte komplette segmenteringsmetoder, dvs. hver pixel er tildelt et segment. De er også fri for overlapning, så ingen pixel er tildelt flere segmenter. I modsætning til mange andre segmenteringsmetoder danner tærskelværdimetoderne ikke sammenhængende segmenter. Det er ret tænkeligt og ofte ønsket, at flere rumligt adskilte objekter i billedet, som har en lignende lysstyrkeværdi, kombineres til et segment. I praksis forekommer der også regelmæssigt forkert segmentering af individuelle pixels midt i objekter, hvilket f.eks. Skyldes billedstøj i outputbilledet. Størrelsen på de segmenterede objekter kan variere meget afhængigt af valget af tærskelværdien.
varianter
Uanset valget af tærskelværdi (som beskrevet i afsnittet med samme navn nedenfor), kan det grundlæggende princip for tærskelværdimetoden anvendes på forskellige måder.
I den globale tærskelmetode vælges en tærskelværdi globalt for hele billedet. Den tilknyttede beregningsregel blev allerede givet i afsnittet Egenskaber ovenfor. Proceduren er den nemmeste at beregne, men den er også meget modtagelig for ændringer i billedets lysstyrke.
Tærskelværdimetoder med en global tærskel bruges derfor kun med succes i industrielle applikationer til billeder med høj kontrast. Sådanne billeder opstår for eksempel ved scanning af originaler eller når man tager billeder i transmitteret lys.
Ved at definere flere tærskelværdier kan den globale metode varieres på en sådan måde, at segmenteringen giver mere end to segmenter. For n segmenter (n-1) tærskelværdier værdier t i er påkrævet:

Med den lokale tærskelværdimetode opdeles det indledende billede i regioner, og tærskelværdien bestemmes separat for hver region. Det betyder, at en passende tærskelværdi t jeg kan vælges i hvert billede region R i , uden at dette påvirker kvaliteten af segmenteringen i andre regioner. Beregningsreglen for hver pixel (x, y) er:

Sammenlignet med den globale tærskelværdimetode stiger kompleksiteten kun ubetydeligt; den lokale metode kan derfor også beregnes med ringe computerindsats. Modtageligheden for ændringer i lysstyrke falder, men der kan være en forskydning ved regionernes grænser. Afhængigt af antallet af regioner kan det være for meget for en person at vælge den passende tærskelværdi for hver region. Derfor anbefales en automatisk procedure til valg af tærskelværdi.
Den dynamiske tærskelværdimetode kan ses som en videreudvikling af den lokale metode , der betragter et kvarter N for hver pixel og beregner en passende tærskelværdi t (N) på basis af dette kvarter . En automatisk procedure til valg af tærskelværdi er absolut nødvendig her. Den tilsvarende beregningsregel for hver pixel (x, y) er:

Den dynamiske variant er ret stabil mod lokale ændringer i lysstyrke. Beregningsindsatsen stiger dog betydeligt her, da der beregnes en ny tærskelværdi for hver pixel.
eksempel
- Støjbillede

Indledende billede ...

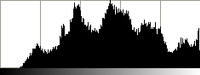
... og det tilknyttede histogram (logaritmisk skala).


Prøvebilledet er et støjende gråtonebillede med uklare kanter, som det ses til venstre. Slørede kanter betyder her, at kanterne ikke er klare, men snarere gennemgår en overgang fra den hvide baggrund til den sorte genstand, og pixelerne i kantområdet får forskellige gråtoner.
Det tilknyttede histogram (til højre) hjælper dig med at vælge den tærskelværdi, der passer til billedet . I et histogram er frekvensen for hver enkelt grå værdi angivet med en tilsvarende høj linje. En bjælke med de forskellige grå værdier vises derfor som en forklaring på den vandrette koordinatakse, og linjens højde angiver den relative hyppighed af forekomst af den respektive grå værdi.
To maksima kan tydeligt ses i histogrammet : den mørke genstand (venstre maksimum) og den lyse baggrund (højre maksimum). Hver grå værdi mellem de to maksima vises også i billedet, hvilket er forårsaget af støj i billedet og de bløde objektkanter, hvor pixlerne gradvist påtager sig de forskellige grå niveauer fra hvid til sort.
Det oprindelige billede blev segmenteret ved hjælp af den globale tærskelværdimetode; for at demonstrere metoden blev resultatbilledet beregnet for fire forskellige tærskelværdier. I de resulterende binære billeder, hver med to segmentgrupper, blev hver pixel farvet sort (0) eller hvid (1) i henhold til dens tildeling til objektet eller til baggrunden. Mere præcist: Alle pixels med grå værdier mindre end tærskelværdien var farvet sorte, alle pixels med grå værdier større end eller lig med tærskelværdien blev farvet tilsvarende hvide.
- Segmentering med en anden tærskel

Tærskel 30

Tærskel 52

Tærskel 204

Tærskel 230




Når det er segmenteret med tærskelværdien 30, er flere pixels, der hører til objektet, farvet hvide, dvs. segmenteret til baggrunden. Tærsklen blev valgt for lavt.
Med de to tærskelværdier 52 og 204 er resultaterne ret anstændige. Dette gælder også for alle tærskelværdier mellem disse to værdier. Forskellen kan ses i det faktum, at objektet bliver lidt større, når tærskelværdien stiger. Valget af tærskelværdien påvirker derfor ikke kun kvaliteten af selve segmenteringen, men også størrelsen på de segmenterede områder. Årsagen til områdets vækst er pixlerne i kantområdet, som gradvist dækker de grå værdier fra hvid til sort.
Tærsklen 230 segmenterer også nogle baggrundspixel som tilhørende objektet. Dette er en indikation af, at det blev valgt for stort.
Valg af tærskel
Nøglepunktet i alle tærskelværdimetoder er valget af en passende tærskelværdi. Dette kan fornuftigt vælges af en menneskelig processor. Da den lokale og dynamiske tærskelværdimetode kræver et større antal tærskelværdier, anbefales det at bruge en automatisk metode til bestemmelse af tærskelværdierne. Selvfølgelig kan tærskelværdien også bestemmes automatisk med den globale tærskelværdimetode. Der er et stort antal specifikke metoder til valg af en passende tærskelværdi.
Histogrammet er det vigtigste hjælpemiddel til både manuel og automatisk definition af en tærskelværdi. Lokale maksima angiver de grå værdier eller gråværdiområder, der antages i billedet fra baggrunden eller fra større objekter. I det ideelle tilfælde er histogrammet bimodalt , dvs. to tydeligt adskilte maksima kan genkendes. En enkel, men også fejlbehæftet tilgang er at vælge middelværdien mellem de to maksima som tærskelværdien. En anden, enkel tilgang er at definere den grå værdi af minimumet mellem maksimaet som tærskelværdien. Dette vil sandsynligvis opnå en noget bedre adskillelse.
Hvis du behandler billeder fra den samme kilde igen og igen, kan du ofte anvende en tærskelværdi, der er valgt én gang på alle disse billeder.
En af de mere sofistikerede metoder til automatisk bestemmelse af tærskelværdier er Otsu-metoden, som har etableret sig som en standard og vil blive præsenteret nedenfor.
Procedure for Otsu
Den Otsu metode ifølge Nobuyuki Otsu fra 1979 bruger statistiske værktøjer til at løse problemet med den bedst mulige grænseværdi. Især anvendes variansen , som er et mål for spredningen af værdier - i dette tilfælde handler det om spredningen af de grå værdier.
Otsu-metoden bestemmer en tærskelværdi, hvor spredningen inden for de klasser, der bestemmes af den, er så lille som muligt, men samtidig så stor som muligt mellem klasserne. Til dette formål dannes kvotienten mellem de to afvigelser, og der søges en tærskelværdi, hvor den er så stor (maksimum) som muligt.
Matematisk repræsentation
Udgangspunktet er to klasser af punkter ( og ), der er adskilt fra hinanden baseret på den ønskede tærskelværdi . er den variabel, du leder efter, er de to klasser det ønskede resultat. I det følgende bestemmes et mål ved hjælp af Otsu-metoden, ifølge hvilken tærskelværdien (og dermed klasserne) kan optimeres.



Lad sandsynligheden for forekomst af den grå værdi være 0 <g <G (G er den maksimale grå værdi). Derefter resulterer sandsynligheden for udseendet af pixels i de to klasser med:

- : og :




Antages to klasser (dvs. en tærskelværdi), er summen af disse to sandsynligheder naturligvis 1.
Hvis det aritmetiske gennemsnit af de grå værdier ligger inden for hele billedet, og og middelværdierne inden for de enkelte klasser, resulterer afvigelserne inden for de to klasser som:



- og


Målet er nu at holde variansen af de grå værdier i de enkelte klasser så lav som muligt, mens variansen mellem klasserne skal være så stor som muligt. Dette resulterer i følgende kvotient:

Variationen mellem klasserne er:

Variationen inden for klasserne skyldes summen af de to individuelle afvigelser:

Tærskelværdien er nu valgt, så kvotienten er maksimal. så er det beløb, du leder efter. Hvis en tærskelværdi bestemmes ved at maksimere kvotienten, opdeler den punktsætene i optimale klasser i henhold til variansen.

Problemer
- Problemer med lysstyrke

Billedet med en lysstyrkegradient, ...
... det tilknyttede histogram (lineær skalering) ...

... og resultatet af segmenteringen med tærskelværdien 127.



Den globale tærskelmetode er meget følsom over for ændringer i lysstyrke på tværs af billedet. De tre billeder viser dette problem: Det originale billede (til venstre) fik en lysstyrkegradient. Histogrammet (mellembillede) er ikke længere bimodalt, som i eksemplet ovenfor kan der ikke identificeres to tydeligt adskilte maksima, men der er betydeligt flere, temmelig små lokale maksima. Resultatbilledet (til højre) af segmenteringen med tærskelværdien 127 er inkonsekvent: øverst til venstre segmenteres hele baggrundsområder som et objekt, mens objektet nederst til højre genkendes som baggrunden. Segmenteringen er stort set kun korrekt midt i billedet.
Anvendelsen af den lokale eller endda den dynamiske tærskelværdimetode kunne forbedre segmenteringsresultatet her. Især sidstnævnte er dog meget mere beregningsintensivt. Derudover skal det sikres, at alle objekter, der skal segmenteres, forekommer i hver region, ellers kunne de automatisk valgte tærskelværdier beregnes forkert. For eksempel, hvis der er tre objekter (og baggrunden) i billedet, vælges tre tærskler for at adskille de fire klasser. Hvis kun to af de tre objekter vises i en region, kan den tredje tærskelværdi ikke bestemmes korrekt der. Så resultatet af segmenteringen fra denne region svarer ikke godt til resultaterne fra de andre regioner. En alternativ løsning ville være at kompensere for lysstyrken i et forbehandlingstrin, for eksempel med en skyggekorrektion eller ved at udligne et referencebillede .
Ud over lysstyrkegradienter kan andre billedfejl, der kan føre til segmenteringsproblemer, elimineres eller reduceres ved passende billedforbehandling. Støjfjernelse fra billeder eller skærpning af kanter bruges ofte. Efterbehandling kan også hjælpe med at eliminere segmenteringsproblemer. På denne måde kan forkert segmenterede pixels korrigeres af mennesker eller ved passende filtrering.
I modsætning til mange andre segmenteringsmetoder resulterer tærskelværdimetoden ikke automatisk i tilsluttede segmenter; i tilfælde af stærk støj segmenteres individuelle pixels næsten altid.
Tærskelværdimetoderne bruger altid kun en-dimensionel billedinformation (normalt en intensitetsværdi eller grå værdi). Yderligere oplysninger, for eksempel forskellige farvekanaler, evalueres ikke.
Nogle af disse problemer kan undgås ved at bruge andre, nogle gange mere komplekse, segmenteringsmetoder .
Ansøgninger
Tærskelværdimetoderne er meget velegnede til hurtig binærisering (adskillelse af objekter og baggrund) af jævnt belyste billeder, for eksempel scanninger . Dette betyder for eksempel en god egnethed til det første trin i en tekstgenkendelse .
Den er inkluderet som en redigeringsfunktion i mange billedredigeringsprogrammer , for eksempel i GIMP , ImageJ og IrfanView .
Tærskelværdimetoder er også standardmetoder i digital billedbehandling og er inkluderet i dette område i hvert programbibliotek .
litteratur
- Thomas Lehmann, Walter Oberschelp, Erich Pelikan, Rudolf Repges: Billedbehandling til medicin . Springer, Berlin / Heidelberg 1997, ISBN 3-540-61458-3 .
- Bernd Jähne : Digital billedbehandling . 5. udgave. Springer, Berlin 2002, ISBN 3-540-41260-3 .
- Rafael C. Gonzalez, Richard E. Woods: Digital billedbehandling . Addison-Wesley, Reading MA 1992, ISBN 0-201-50803-6 (engelsk).
- Nobuyuki Otsu: En metode til valg af tærskelværdi fra histogrammer i gråt niveau . I: IEEE-transaktioner på systemer, mennesker og cybernetik . New York, 9.1979, s. 62-66. ISSN 1083-4419
Weblinks
- Seminarpræsentation om segmentering (PDF; 900 kB)
Individuelle beviser
- ↑ Kortlægning over billedterskelsteknikker (engelsk; PDF; 3,0 MB)